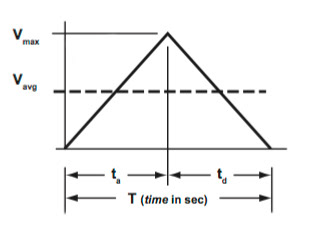
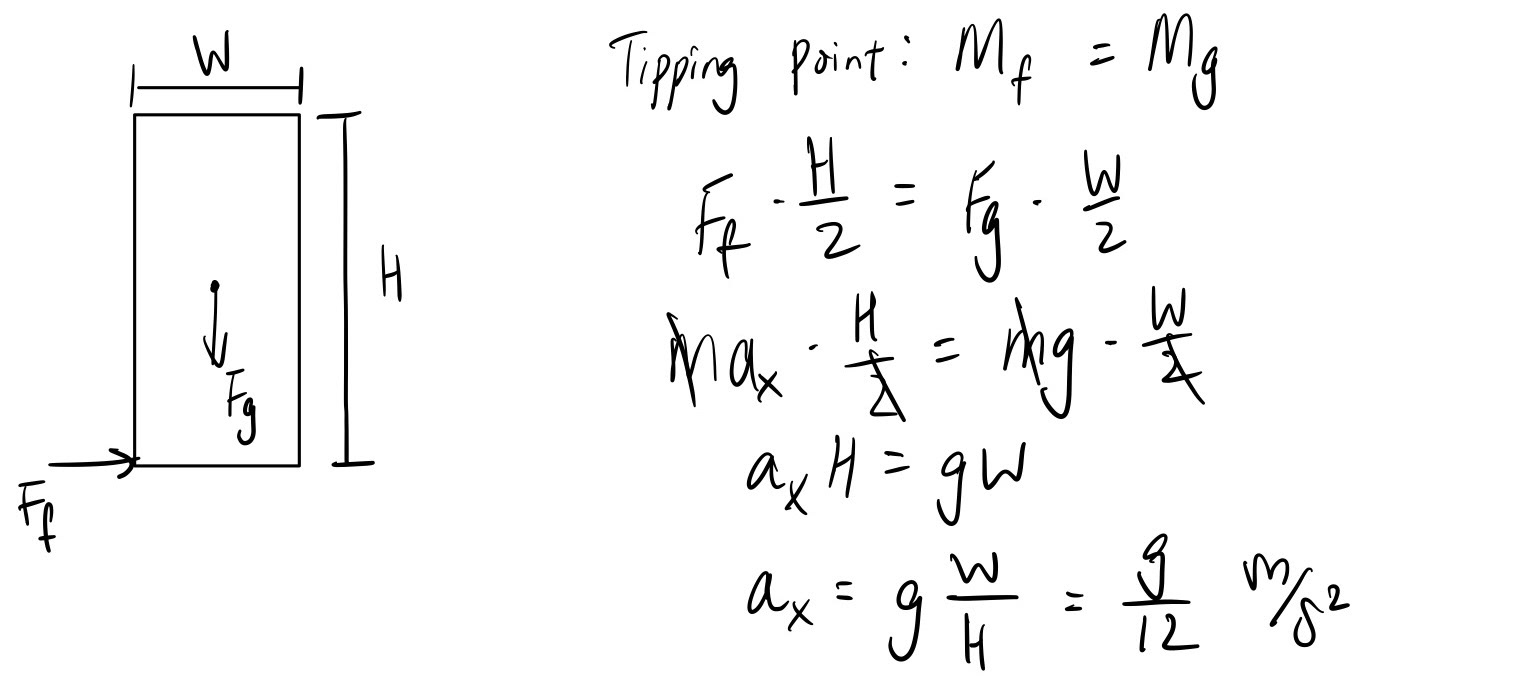
The aim of this project was to create a car with a velocity curve that would allow us to balance a vertical beam. This was also a friendly competition between classmates, as such, we were competing against each other to build the fastest car possible, while still being able to balance the beam. To achieve our goal, we first determine the optimal velocity curve shape to be a triangular velocity profile. From this profile, we knew that the acceleration of the car will be constant. As seen in the figures below, we calculated the maximum acceleration the car can have before the beam tips over. Using this acceleration information, and also the dimensions of the beam (40x40mm aluminum extrusion), we created a simulation in SolidWorks to verify our calculations. The acceleration was verified to be around 0.8175 m/s^2, and we can now build the car and program the velocity curve to the Arduino.
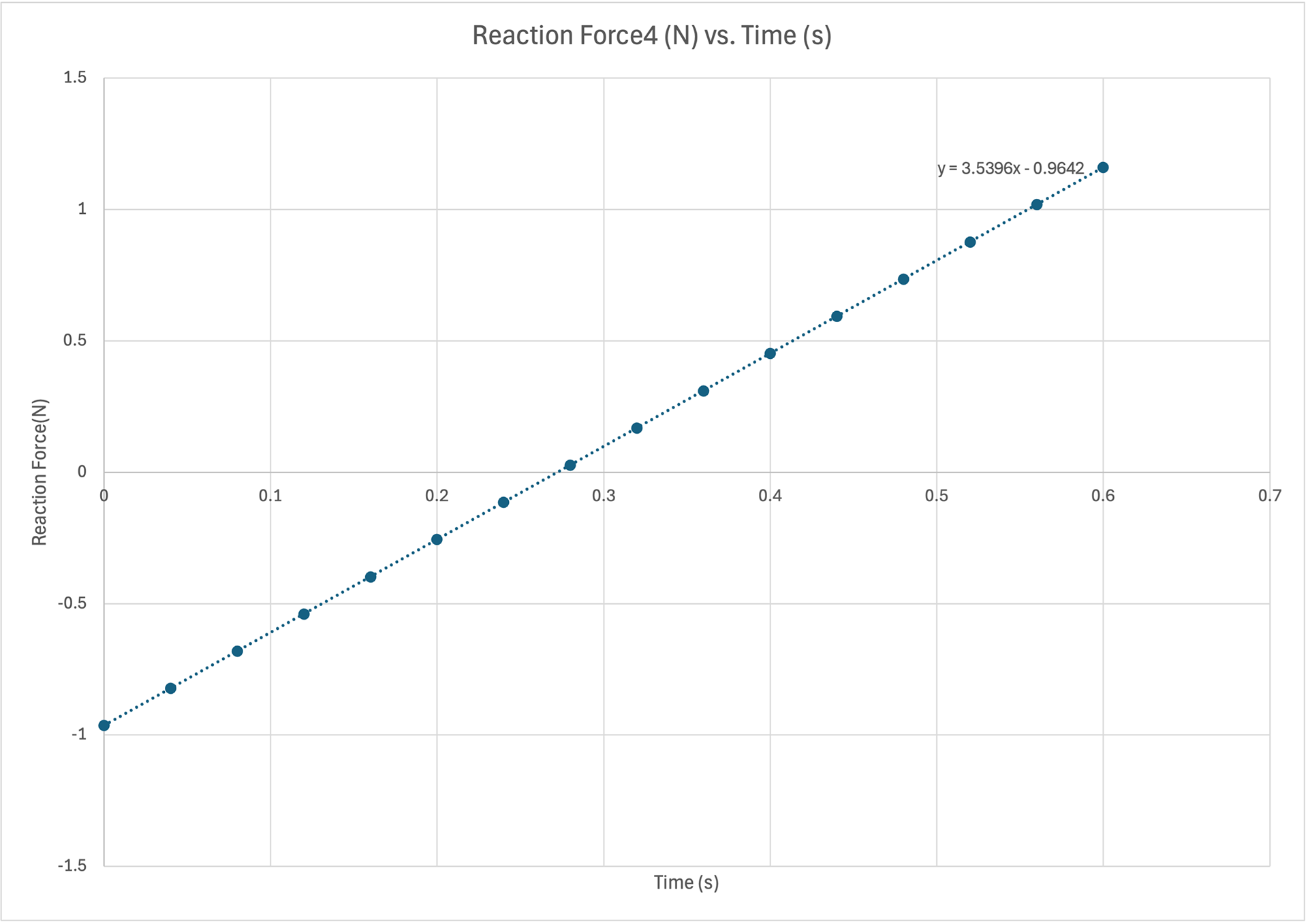
Using this graph generated from the simulation, at the point where the reaction force is zero is when the beam tips over. I can then extract the time at which this occurs during the simulation and solve for the acceleration, which matches the hand calculations above.